
PROJECTS

The Tourbot
Click the image for the Tourbot video

Arduino Mega
DIFFERENTIAL DRIVE VEHICLE FOLLOWING VISUAL SIGNS
As a class project for my graduate level course (Basic Mobile Robotics), I worked with a team to program a differential drive vehicle that followed visual signs (called Fiducials). You could either carry these Fiducials with you or place these in specific locations in it's path. According to the program the vehicle would recognise these signs and did tasks assigned to those signs. In our last program, the robot was programmed to react to specific signs and made to reach it's destination. Major components included a webcam mounted on couple of servos, a Windows laptop that the vehicle carried, ultrasonic sonar sensors on all sides of the vehicle, Arduino Mega connected to the sensors and the DC motor drivers that were connected to the wheels.
The feed from the webcam was collected by the laptop. The software Roborealm was coded so that it would look for the predetermined Fiducials in the live video from the webcam. Once any such Fiducial was located, information including it's type, it's distance from the vehicle and orientation was relayed to the Arduino. The Arduino was fed with a large set of values and decisions to be taken depending on those values. This recently obtained information was compared with the older information and decisions were reached. These included moving forward, making turns and stopping. The parallel algorithm also determined the correct movement of the robot overseeing that the vehicle never bumped into any stationary as well as mobile obstruction. It also had an alarm system that would ring if any mobile object came too close to it. The robot was successful in moving from inside one of our lab to a location on the other side of our building through the corridor.
The figures and videos show the "Tourbot" in action.

The Fiducial

The Ultrasonic Sensors
The Sniffing Robot
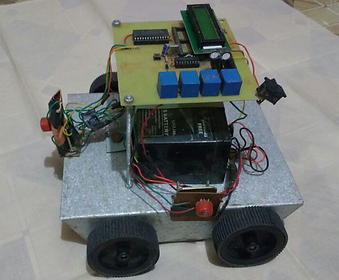
PCB on the Robot

THE SNIFFING ROBOT
The Sniffing Robot was created as a final year project during my undergraduate studies at he University of Pune, Maharashtra, India in the year 2011-12. My colleague Ms. Mrinal Shinde was also involved in this project along side me.